Key Takeaways
- NVIDIA has launched the GR00T N1 model, the first open and customizable humanoid robot foundation, alongside simulation tools and the Newton physics engine.
- The GR00T N1 aims to enhance robotics development, particularly in industries facing labor shortages, with capabilities for complex tasks and adaptability.
- A collaboration with Google DeepMind and Disney Research will help create a robust physics engine and facilitate rapid robotics training through synthetic data generation.
NVIDIA Unveils Innovative Tools for Humanoid Robots
NVIDIA has introduced a comprehensive suite of artificial intelligence technologies aimed at advancing humanoid robots. The centerpiece of this release is the Isaac GR00T N1 model, described as the world’s first open and fully customizable foundation model designed for general humanoid reasoning and skills.
In addition to the GR00T N1 model, NVIDIA has launched various simulations and blueprints for robotics development, including the NVIDIA Isaac GR00T Blueprint for generating synthetic data. A significant part of this initiative is the Newton physics engine, currently under development in partnership with Google DeepMind and Disney Research. This engine is set to enhance robot training and performance through improved physics simulations.
The GR00T N1 model is now available and is the first in a series of planned customizable models that NVIDIA will provide to global robotics developers. This effort responds to current labor shortages impacting over 50 million individuals worldwide, aimed to accelerate the integration of robots across various industries.
Jensen Huang, NVIDIA’s CEO, emphasized the arrival of “generalist robotics,” stating that the combination of the GR00T N1 and the new frameworks will propel robotics developers into a transformative era in AI.
The Architecture of GR00T N1
The GR00T N1 foundation model features a dual-system architecture inspired by human cognition. The first part is “System 1,” a rapid-response model that mimics human reflexes. The second part, “System 2,” is slower and focuses on careful decision-making.
System 2 utilizes a vision language model to interpret its environment and provided instructions to devise action plans. Meanwhile, System 1 executes these plans as precise movements. This model has the ability to generalize across tasks such as moving objects between hands or performing multi-step tasks, which are essential across sectors like material handling and quality inspection.
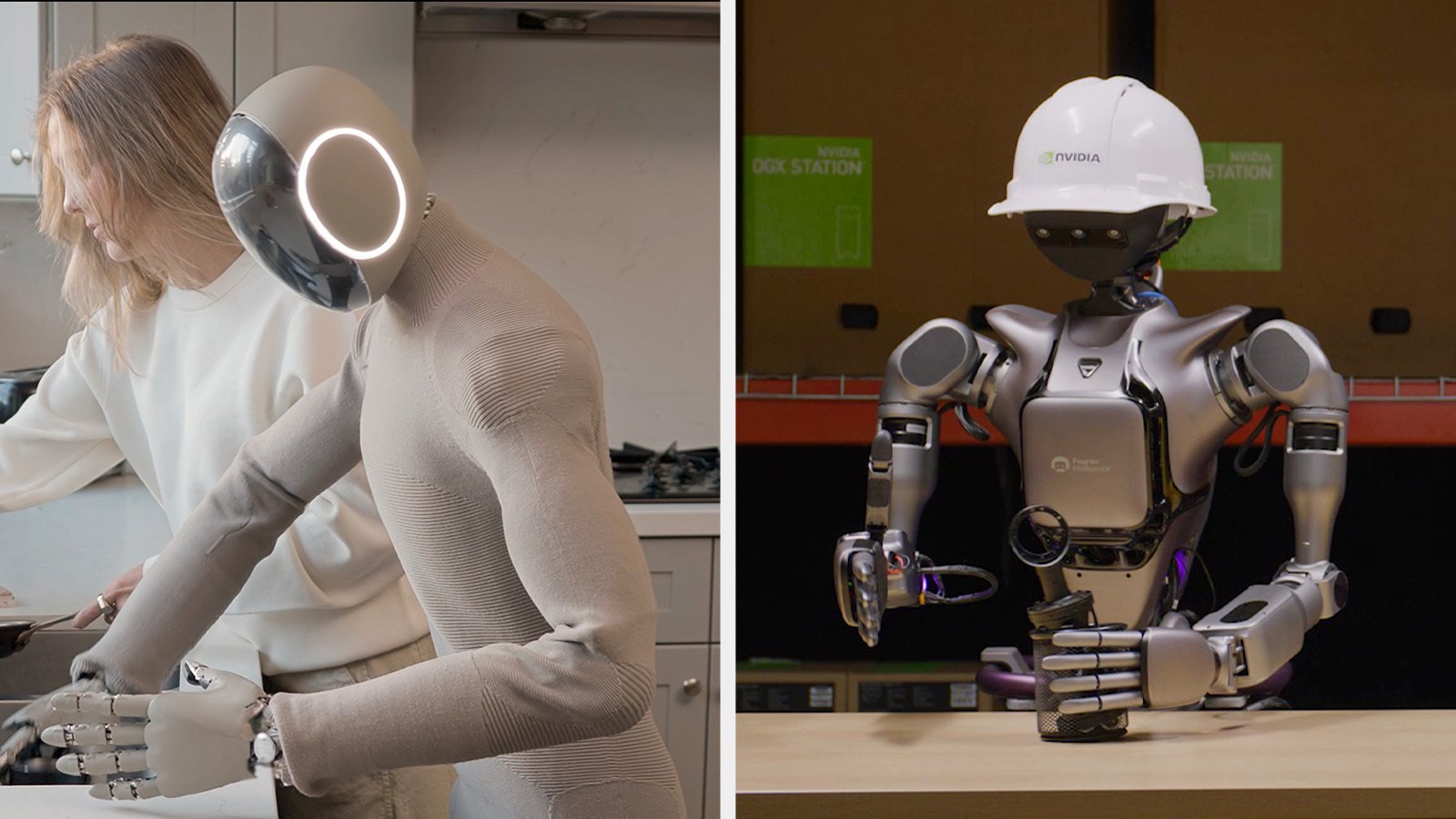
Developers can further fine-tune the GR00T N1 model with their own data, emphasizing customization for specific tasks or humanoid robots. During a recent GTC conference, a demonstration showcased a humanoid robot from 1X autonomously completing household chores by utilizing a policy derived from the GR00T N1 model. This highlighted the successful collaborative efforts in AI training between 1X and NVIDIA.
Collaborative Efforts for Physics Simulation
NVIDIA’s collaboration with Google DeepMind and Disney Research to develop the Newton physics engine is a significant stride in enhancing robot learning capabilities. This open-source engine will allow robots to tackle complex tasks more accurately.
Newton is designed to be compatible with popular frameworks, including Google DeepMind’s MuJoCo and NVIDIA Isaac Lab. Further developments, like MuJoCo-Warp, are anticipated to greatly improve robotics machine learning speeds.
Disney Research intends to apply Newton to advance their robotic character platform, creating more engaging and expressive robots, which would ultimately enhance user experiences.
Advancing Data Availability for Robotics Training
A critical factor in successful robot development is the availability of large, diverse datasets. To tackle this, NVIDIA introduced the Isaac GR00T Blueprint for generating synthetic motion data. This framework enables developers to create substantial synthetic datasets from a limited number of human demonstrations, significantly reducing costs and efforts.
Using this blueprint, NVIDIA demonstrated the ability to generate approximately 780,000 synthetic trajectories in just over 11 hours, showcasing a dramatic improvement in training efficiency for their models.
All resources, including the GR00T N1 training data, are currently accessible for developers on platforms like Hugging Face and GitHub, allowing for immediate experimentation and application in the field. Meanwhile, the Newton physics engine is expected to be released later this year, further enriching the robotics ecosystem.
The content above is a summary. For more details, see the source article.